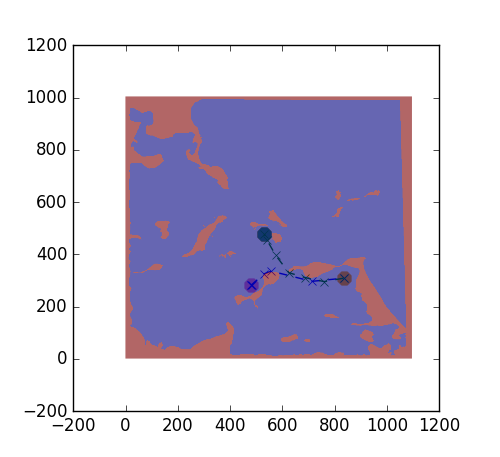
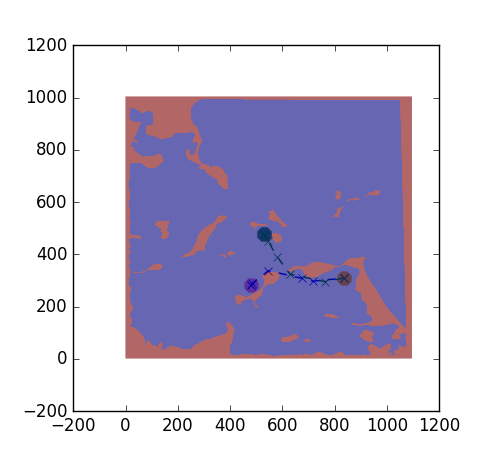
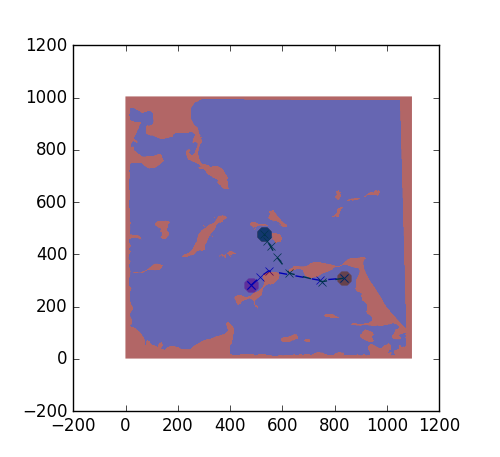
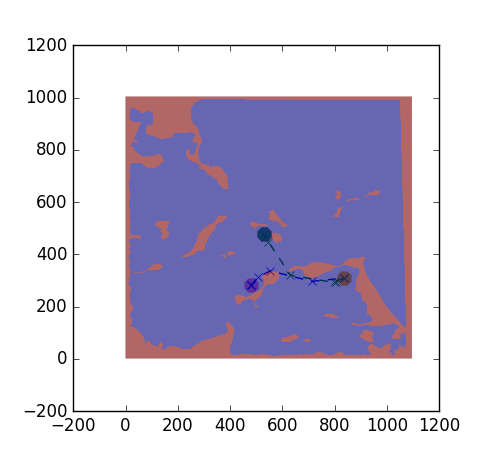
goto planner convergence
This is just a quick archiving of a result using the Goto path planner with three targets. The Goto planner is invoked for each pair of targets, so this is two invokations. What I am glad to see is that even small peninsulas are avoided. Also, the result is the same whether using 500 or 1000 generations.
PSO settings
- Pool size: 50
- Generations: 500
PSO settings
- Pool size: 50
- Generations: 1000